A terv hátulra is tenni motort, hogy jobban bírja az emelkedőt.
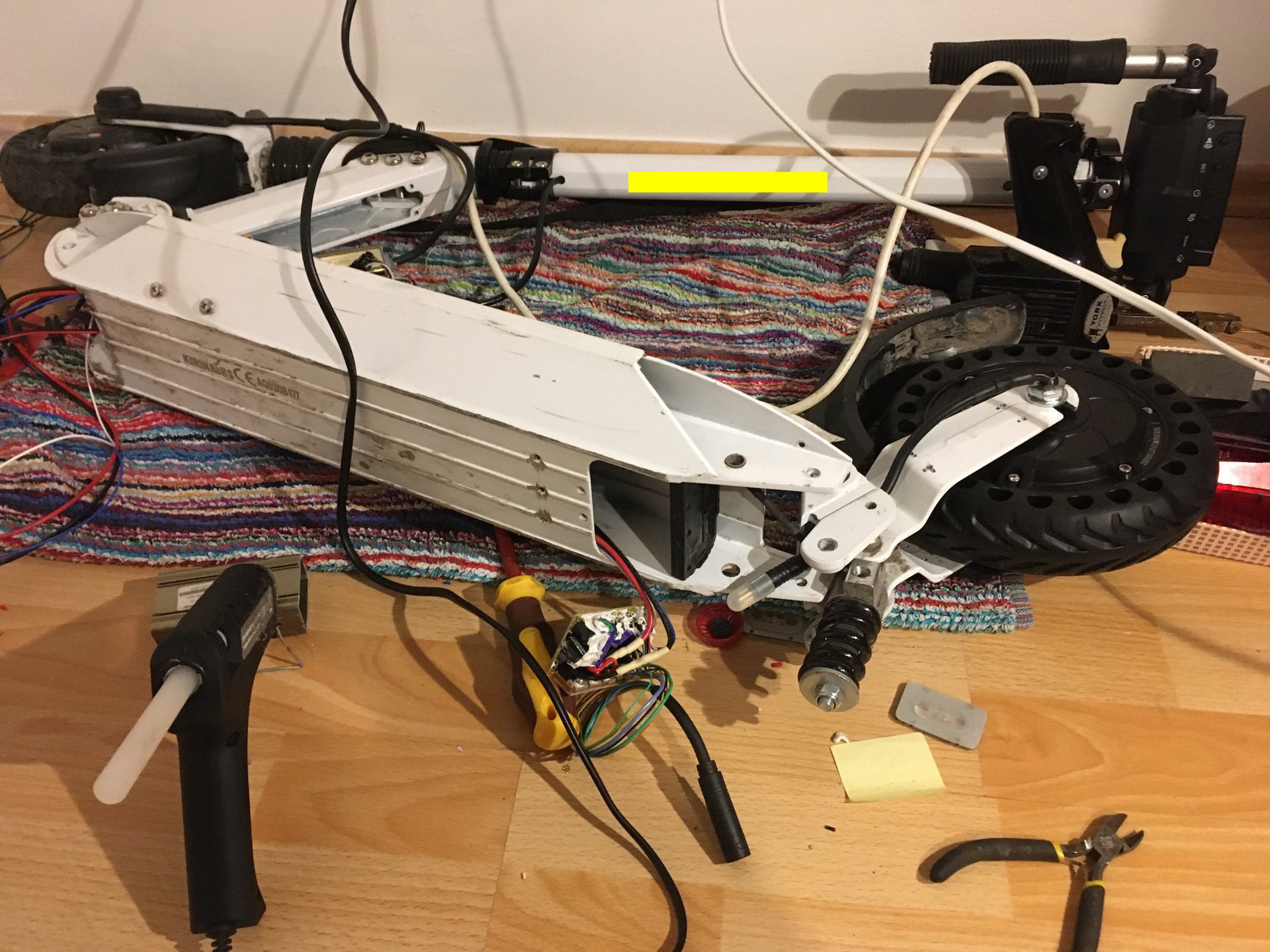
Képek
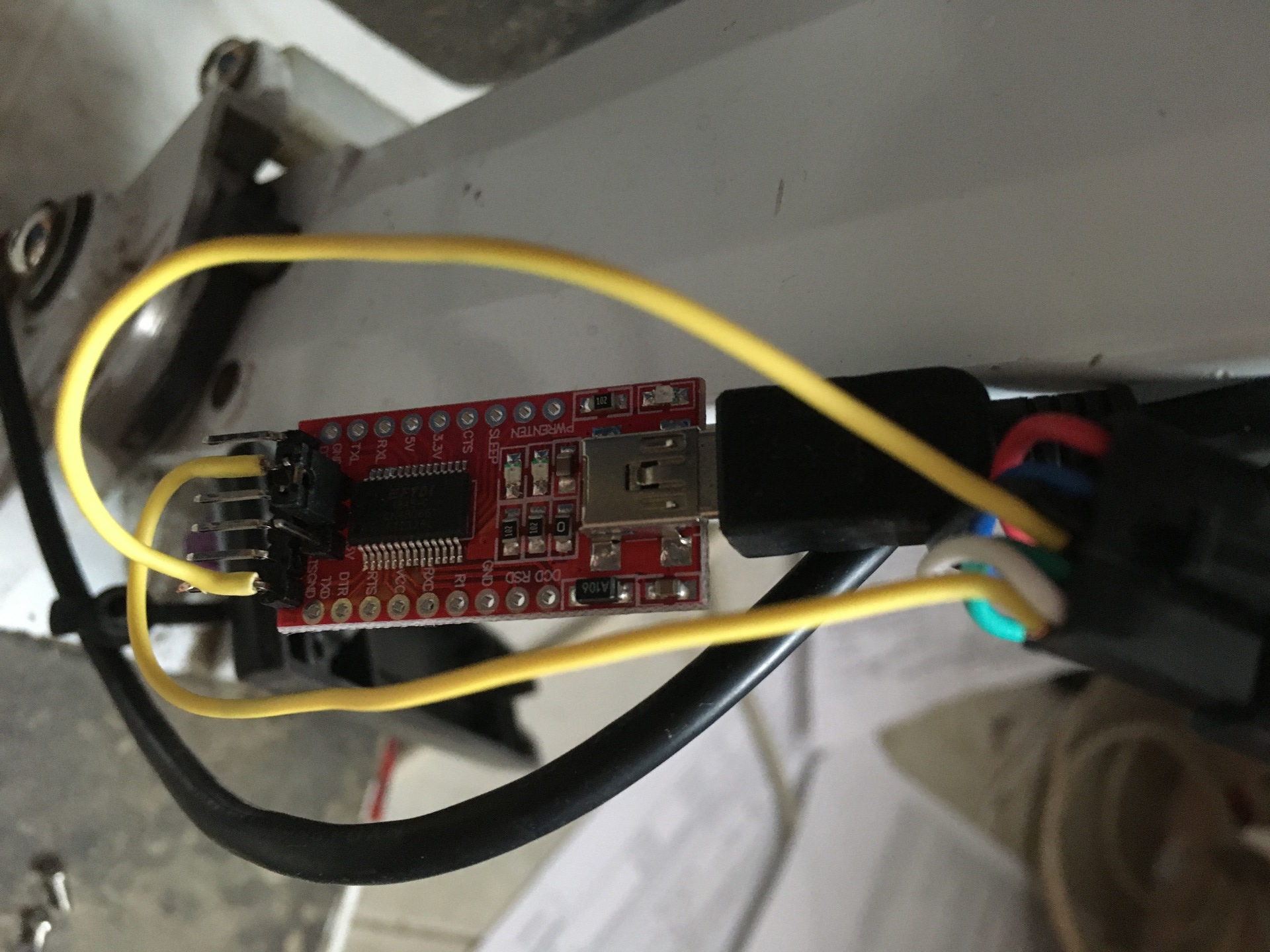
Rendeltem másik motorvezérlőt és kijelző modult. Kiderítettük az interfészt.
- Fekete - Föld
- Piros - +36V állandó táp
- Kék - +36V kapcsolt táp
- Zöld - Motorvezérlő -> Kijelző kommunikáció
- Fehér - Kijelző -> Motorvezérlő kommunikáció
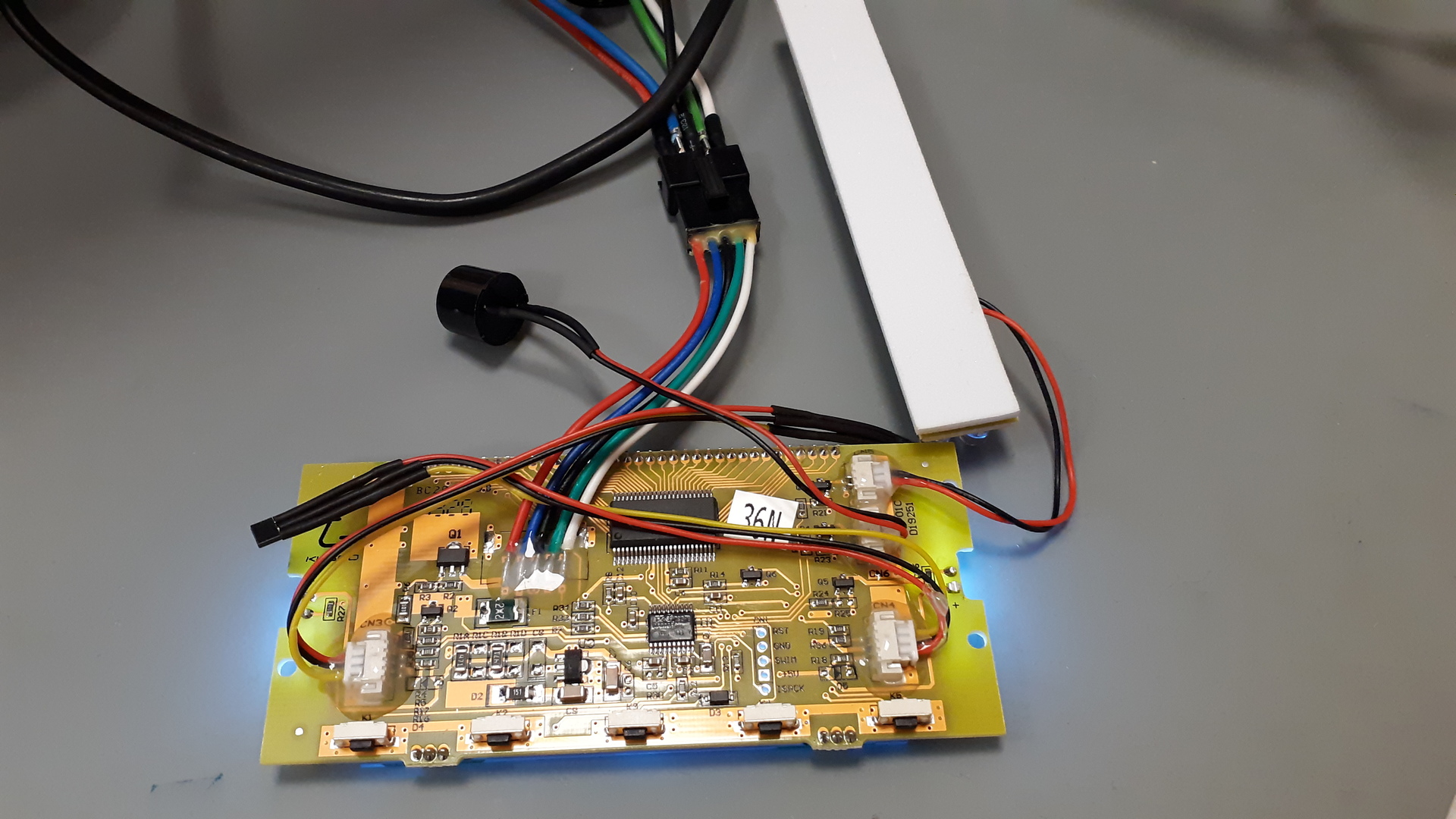
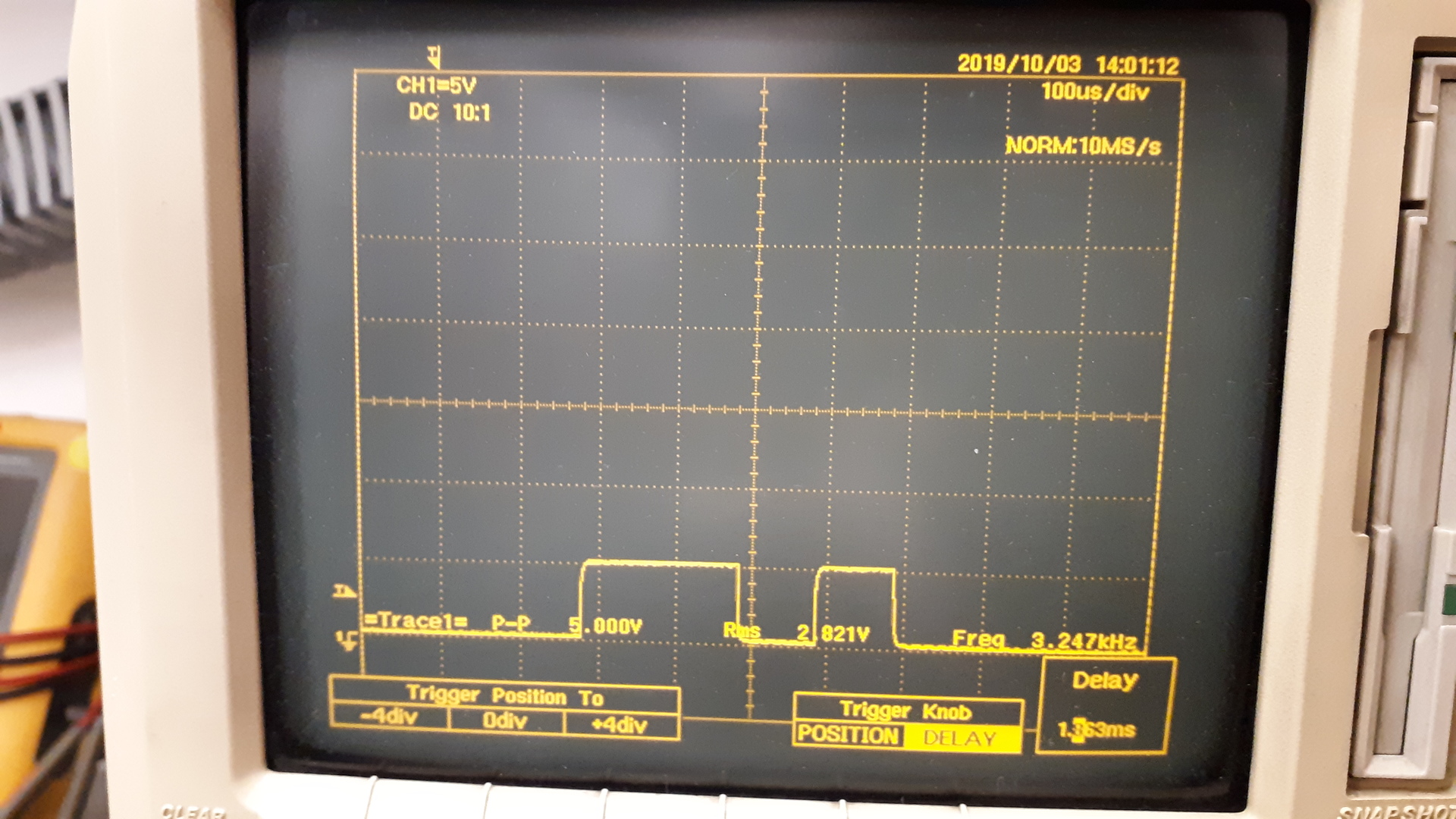
A kommunikáció 9600-as sebességű asszinkron soros kommunikáció.

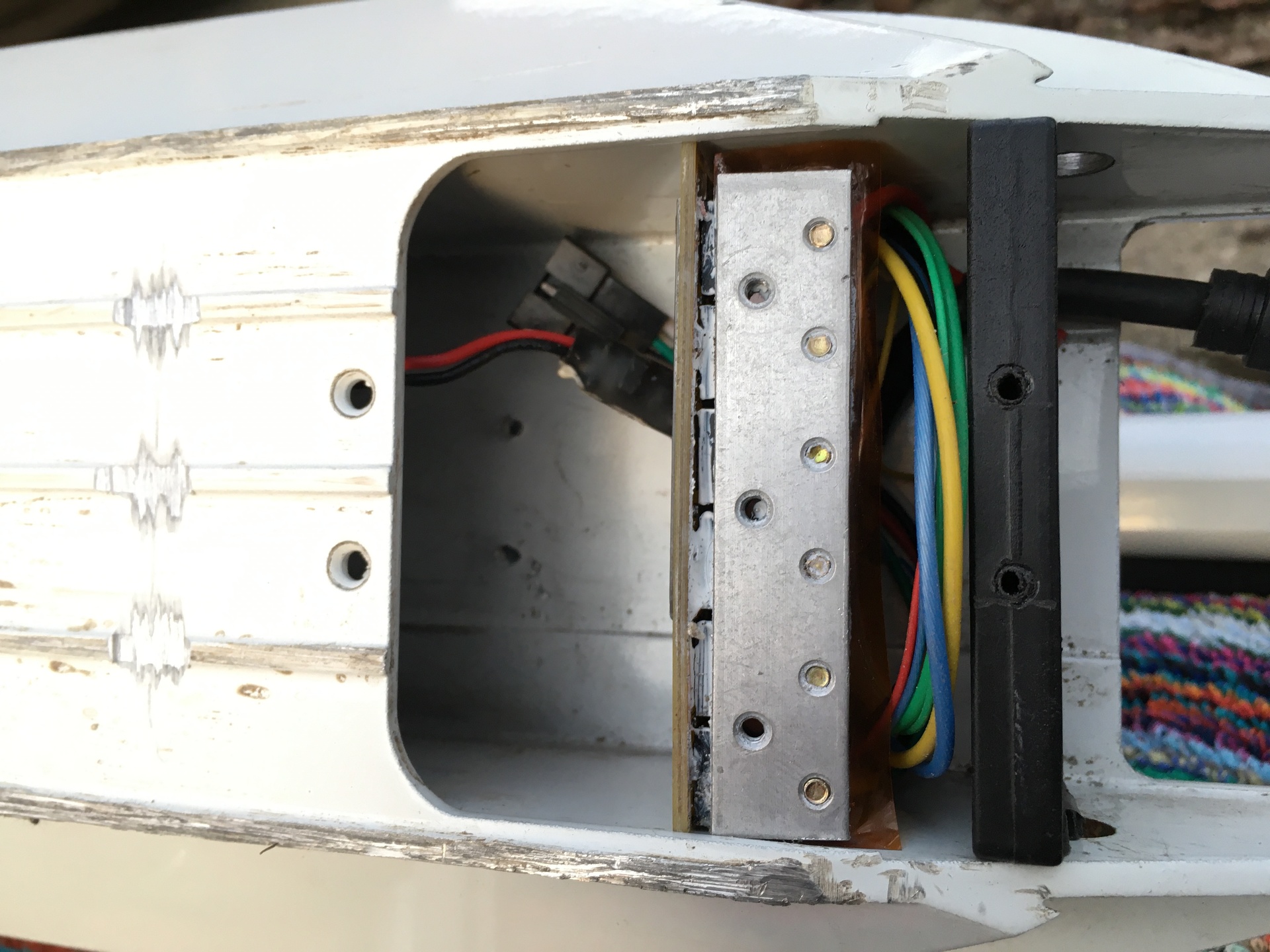
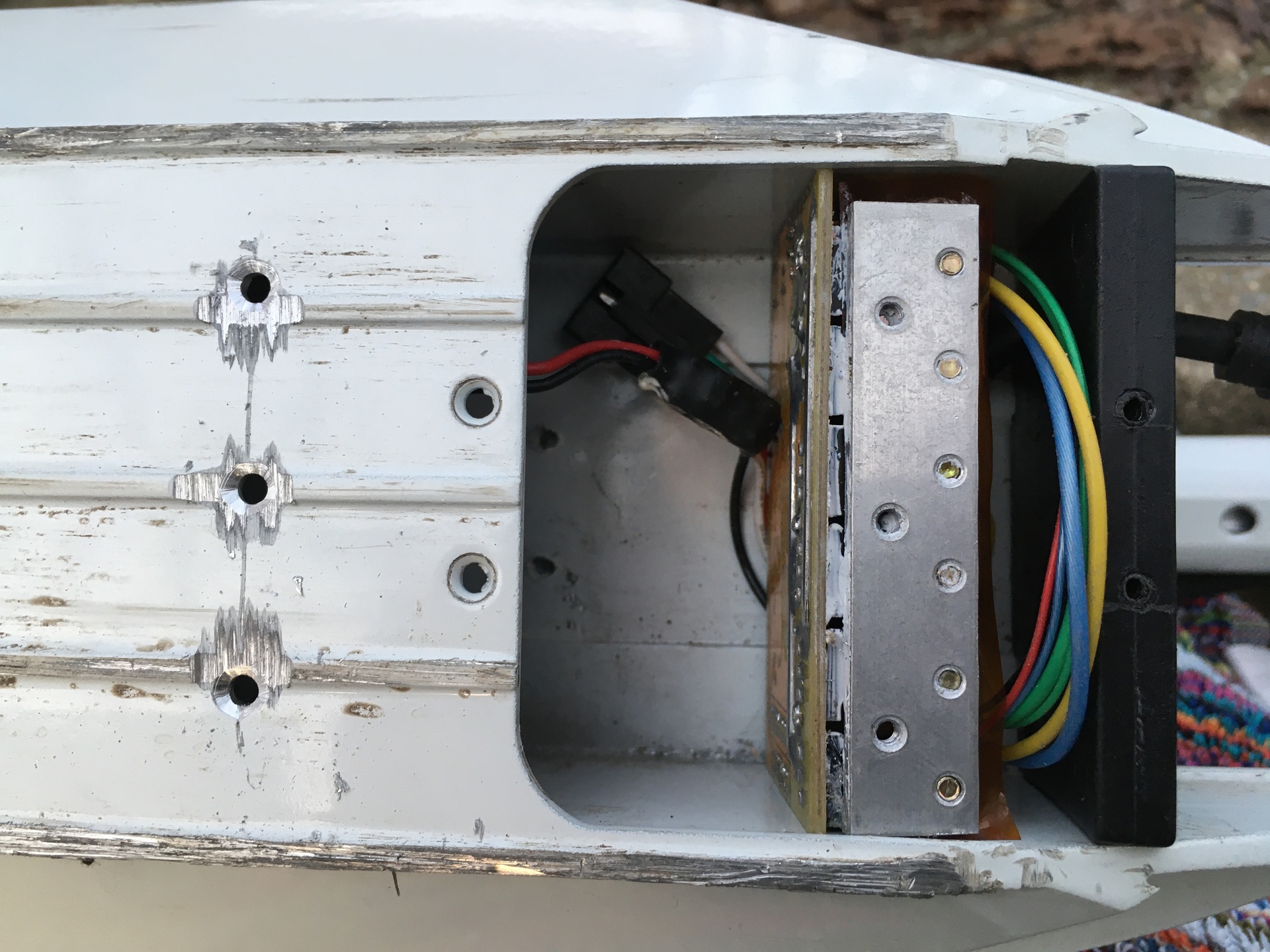
Úgy látszik van még hely az akuumlátor mögött a hátsó verérlőnek.

A vezérlő majdnem elfér.
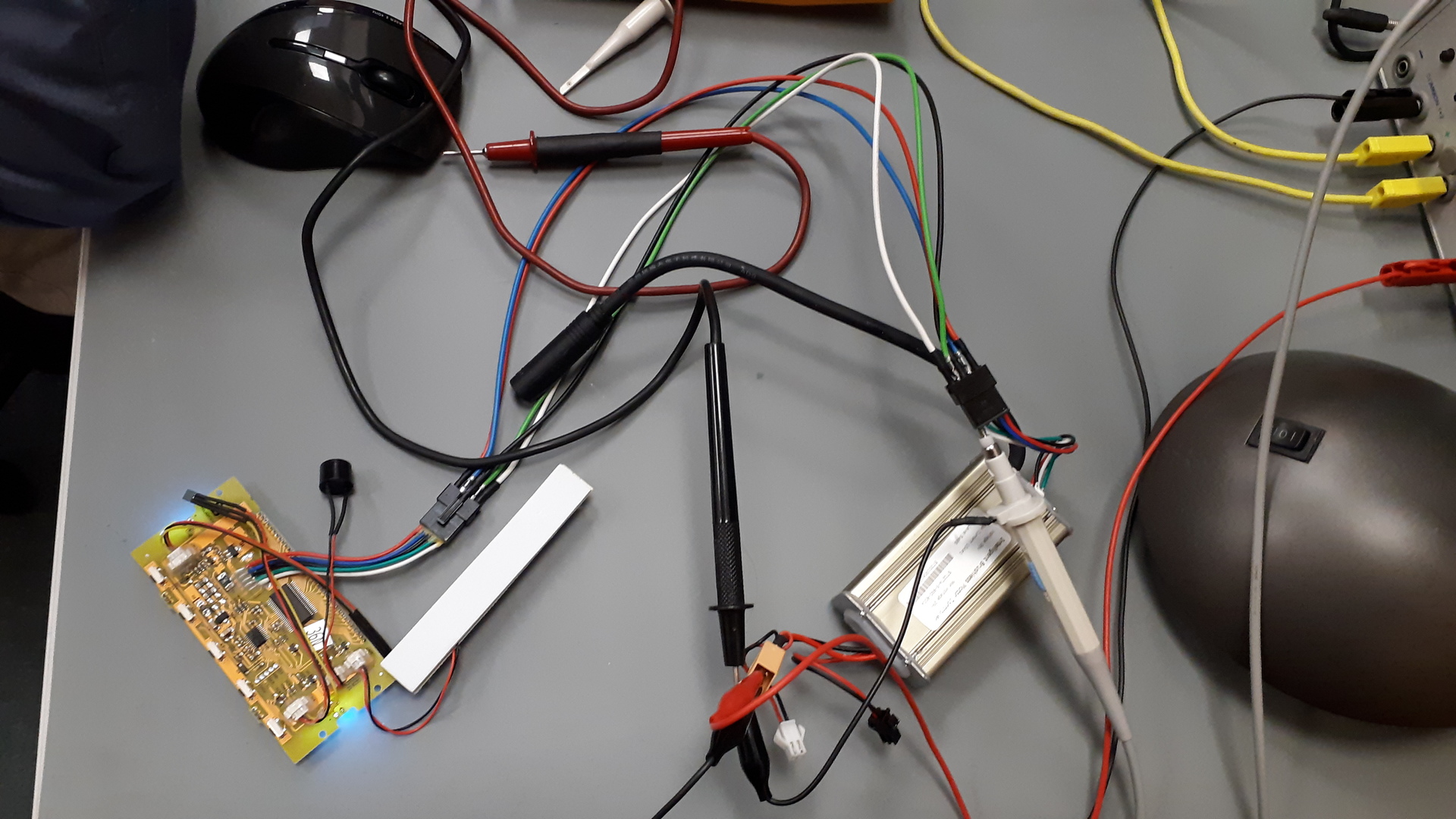
Ha megszakítom a kijelző felé menő kommunikációt,
a roller működik rendesen tovább, csak a vezérlőtől jövő információ hiányzik a kijelzőről. Pl. a sebesség villog és nulla. Ez azt jelenti, hogy ha mindkét kontrollert párhuzamosan kötöm ugyanarra a kijelzőre úgy, hogy a hátsó vezérlő küldött kommunikációja nincs bekötve sehova, akkor a két motornak jól kellene működni, csak a kijelzett áram lesz hamis.
 Lereszeltem a hátsó motor vezérlő nyák széléből fél milimétert.
Most már befér keszesztben.
Lereszeltem a hátsó motor vezérlő nyák széléből fél milimétert.
Most már befér keszesztben.

A protokol
Kijelző -> Vezérlő
8 bájt, 50ms-enként.
Példa: 3E 04 01 00 00 00 00 05
Bájtok
- 1. Fejléc
- 2. Nem tudom mi ez, nem változott a próbálgatások során.
- 3. Sebességfokozat, 1:0x01, 2:0x02, 3:0x03
- 4. Világítás, 0x00:ki, 0x80:be
- 5. Gyorsulás igény 0x00 - 0x78, fokozatosan növelhető, de az aktív tartomány csak a kar 25% és 50% közötti részén van.
- 6. Lassulás igény 0x00 - 0xD1, 0x0A körül gyullad a féklámpa, 0x10 körül már teljes fék van. Nem adagolható.
- 7. Nem tudom mi ez, nem változott a próbálgatások során.
- 8. Ellenörző összeg
Kikapcsoló utasítás: 0xFF 0x00 0x00 a fenti 8 bájtos keret után.
Vezérlő -> Kijelző
11 bájt, 500ms-enként.
Példa: 3C 07 01 00 00 0B B8 00 00 00 CB
Bájtok
- 1. Fejléc
- 2-3. Akuumlátor feszültség (valószínű, nem tudtam változtatni hogy megnézzem tényleg az-e.)
- 4. Kontrollámpák. 0x01: motor hiba. 0x04: Fék aktív.
- 5. Áram [A]
- 6-7. Idő két sebesség érzékelő impulzus között. Ezért a sebesség növekedésével csökken. (0kmh=0x0BB8, 5kmh=0x01CC, 10kmh=0X00D9, 20kmh=0x0070, 34kmh=0x0044)
- 8. Nem tudom mi ez, nem változott a próbálgatások során.
- 9. Nem tudom mi ez, nem változott a próbálgatások során.
- 10. Nem tudom mi ez, nem változott a próbálgatások során.
- 11. Ellenörző összeg
Ezzel a script-el ellenőriztem, hogy jó-e a checksum számoló algoritmus: kugoo_s1_communication_checksum_checker_script.zip

Következő a motoros kerék beépítés.





Aztán a vezérlő elektronika beépítés.




Kicsit még nagy a rendetlenség.

A kommunikációt össze kell kötni. A kezelőhely által kapcsolt tápot is bekötöttem hátha kell a kikapcsoláshoz.

A többi vezetéket kiforrasztottam.
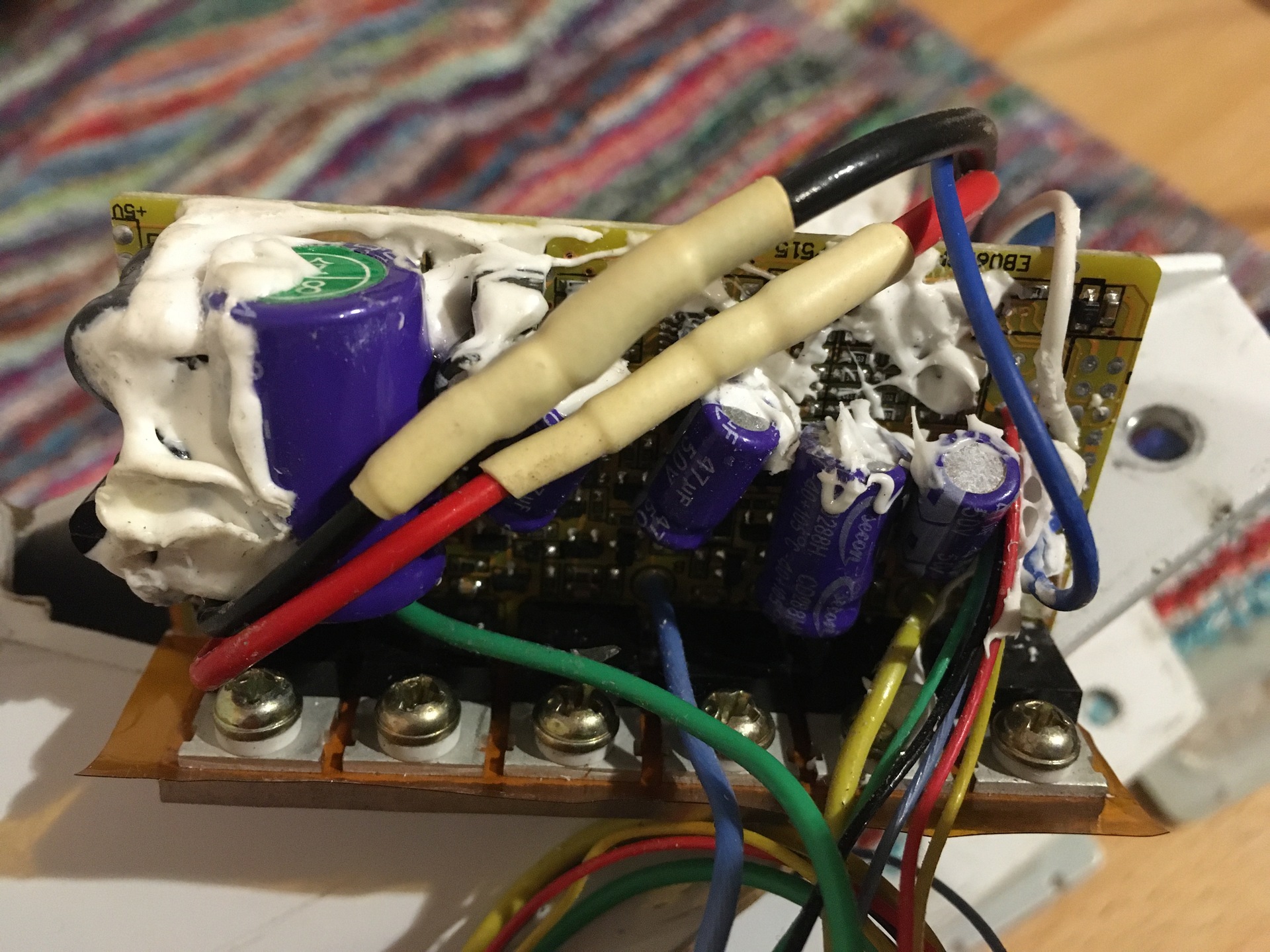
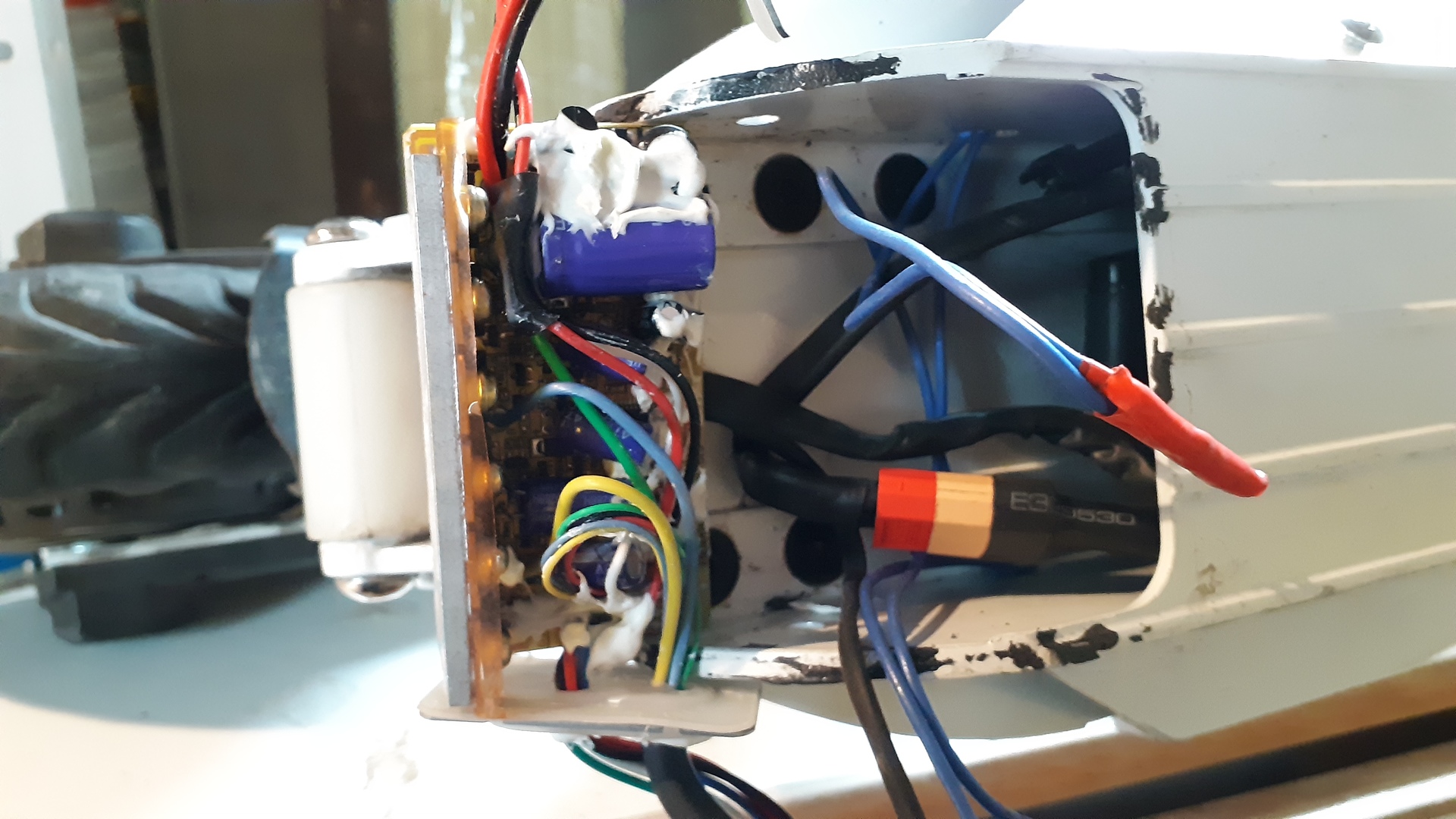
Vezetékeket behúztam a házba.
Ragasztópisztollyal rögzítettem a kondenzátorokat.

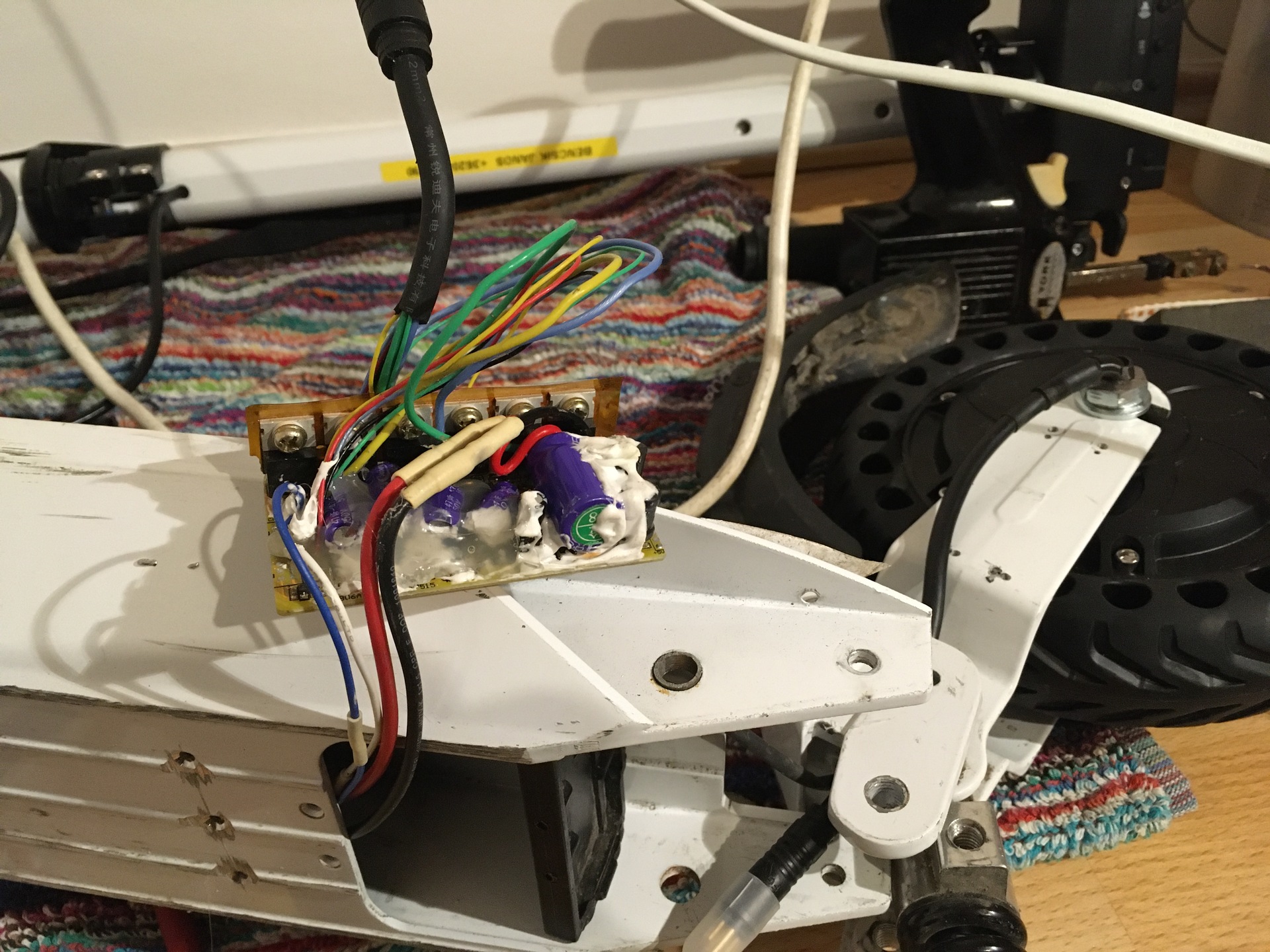
Mehet a vezérlő a helyére.
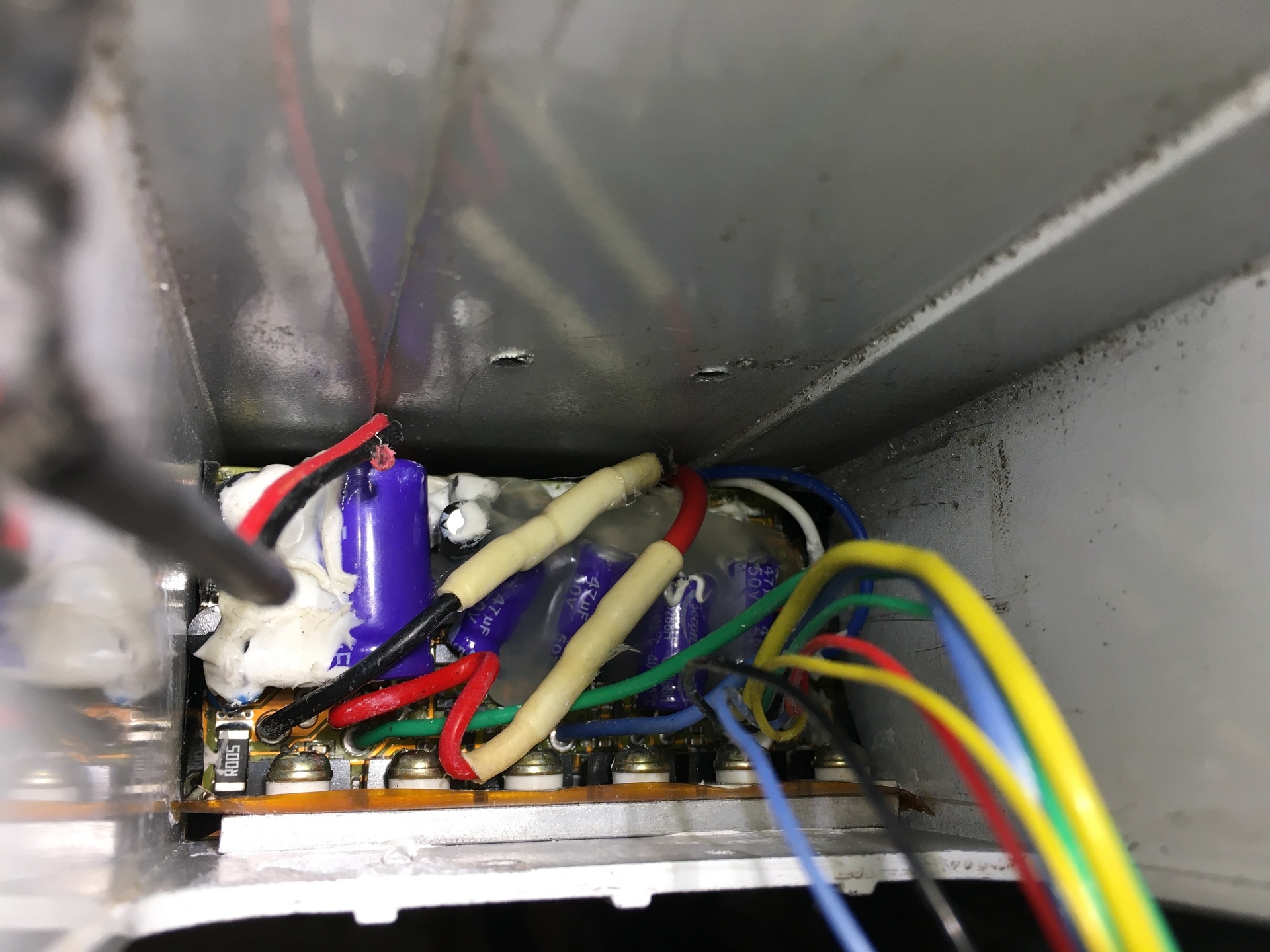

Vezetékek végleges forrasztása és szigetelése.



Itt van a motor csatlakozó.

Így néz ki.


